“결국 전고체 배터리가 다시 뜬다!” 휴머노이드 로봇에도 필수라고?
||2026.02.04
||2026.02.04
휴머노이드 로봇이 넘어야 할 벽
생산 혁신 열쇠는 배터리 지속력
전고체 배터리, 로봇 상용화 가른다

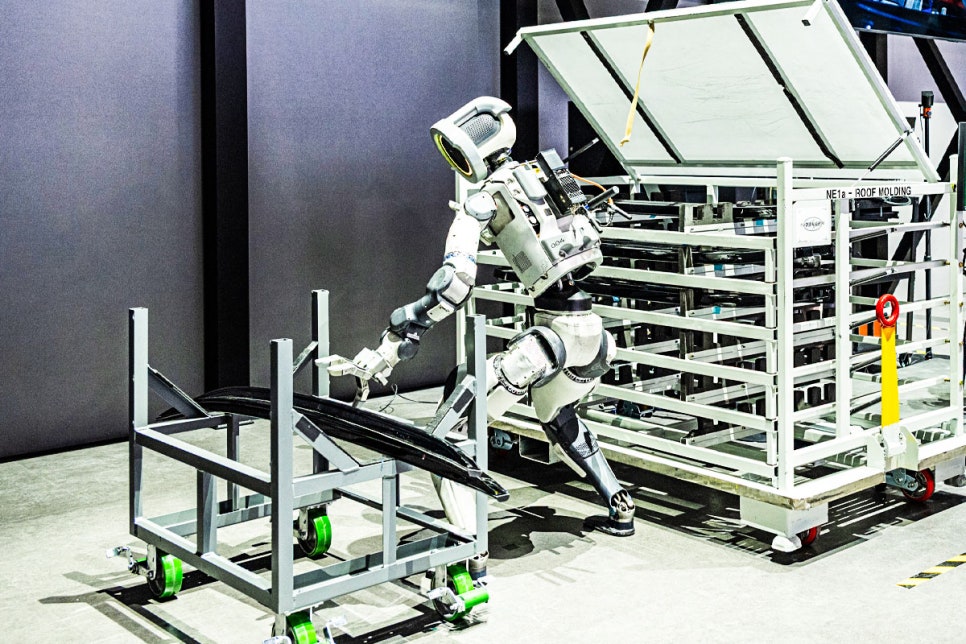
아틀라스 – 출처 : 보스턴 다이나믹스
글로벌 완성차 업계가 휴머노이드 로봇을 차세대 생산 혁신의 핵심 축으로 내세우고 있지만, 실제 노동력으로 정착하기까지는 넘어야 할 현실적 과제가 남아 있다. 그중 가장 근본적인 문제는 배터리다.
사람처럼 걷고, 들고, 반복 작업을 수행하는 기술은 이미 상당 수준에 도달했지만, 현재 공개된 대부분의 휴머노이드 로봇은 연속 작업 기준 약 2시간 내외에서 충전이 필요하다.
이는 기술 완성도의 문제가 아니라 에너지 밀도와 지속력의 한계에서 비롯된 구조적 문제로 지적된다.
현대차 아틀라스가 던진
현실적인 질문
아틀라스 – 출처 : 보스턴 다이나믹스
지난 1월 미국 라스베이거스에서 열린 CES 2026에서 현대차그룹은 피지컬 AI 기반 휴머노이드 로봇 ‘아틀라스(Atlas)’를 공개하며 큰 주목을 받았다.
아틀라스는 촉각 센서를 적용한 손과 최대 50kg 중량물 취급 능력을 갖추고 있으며, 현대차그룹은 이를 2028년부터 미국을 포함한 자동차 생산공장에 투입할 계획이다. 초기에는 부품 분류와 이송 등 단순 공정에, 2030년 이후에는 조립 공정까지 역할을 확대한다는 구상이다.
연간 3만 대 양산 체제 구축 목표 역시 휴머노이드 로봇을 ‘쇼케이스’가 아닌 ‘현장 인력’으로 편입시키겠다는 의지를 보여준다. 다만 이 로드맵의 실현 여부는 배터리 성능 진화 속도에 달려 있다는 분석이 지배적이다.
배터리 교체 방식의 구조적 부담

아틀라스 – 출처 : 보스턴 다이나믹스
아틀라스를 포함한 글로벌 주요 휴머노이드 로봇들은 공통적으로 보행, 자세 제어, 물체 파지 등 동적 작업에서 전력 소모가 급증한다. 정지 상태에서는 수 시간 작동이 가능하지만, 실제 생산라인 기준으로는 2시간 안팎이 현실적인 한계다.
일부 기업은 배터리 교체 방식을 통해 연속 운용을 시도하고 있지만, 이는 여분 배터리 확보와 관리 비용 증가, 작업 흐름 단절이라는 부담을 동반한다. 업계에서는 이러한 방식이 대규모 확산 단계에서는 비효율적이라는 평가가 나온다.
전고체 배터리
로봇과 자동차의 교차점
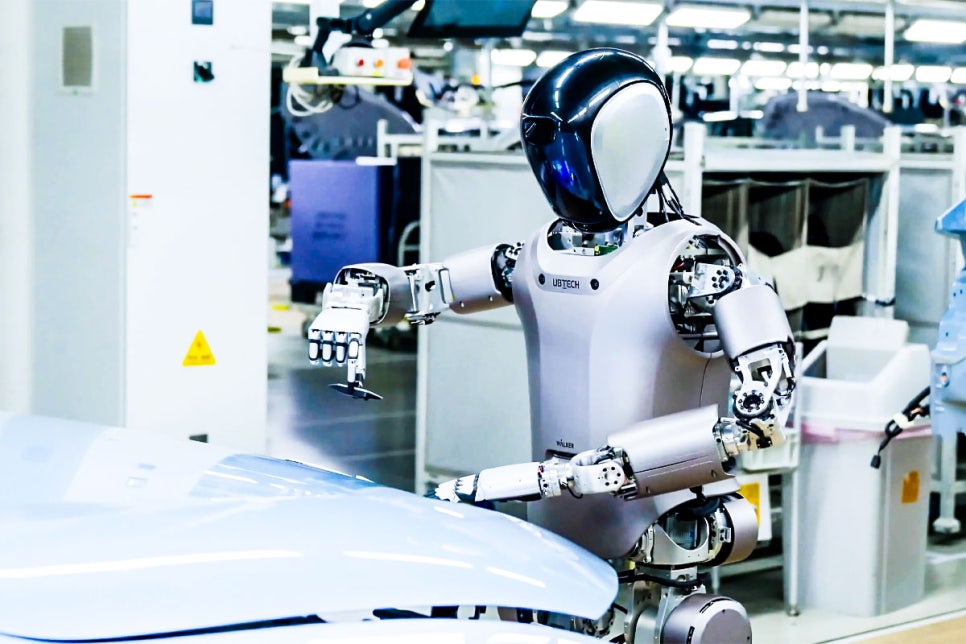
휴머노이드 로봇 – 출처 : 유비텍
시장조사업체 트렌드포스는 향후 10년간 휴머노이드 로봇용 배터리 수요가 급증할 것으로 전망하며, 에너지 밀도와 안전성을 동시에 확보할 수 있는 전고체 배터리를 핵심 해법으로 지목했다.
전해질을 고체로 대체한 전고체 배터리는 화재 위험을 낮추는 동시에 동일 부피 대비 에너지 저장량을 크게 늘릴 수 있어, 고출력·고밀도 응용이 필요한 로봇에 적합하다는 평가다.
흥미로운 점은 이 흐름이 자동차 산업과 직접 맞닿아 있다는 것이다. 전기차 이후 새로운 성장 동력을 모색하는 완성차 업계에 휴머노이드 로봇은 전고체 배터리의 초기 상용화를 시험할 현실적인 수요처로 부상하고 있다.
결국 휴머노이드 로봇의 미래는 AI 알고리즘이나 구동 기술보다 ‘얼마나 오래, 안정적으로 일할 수 있느냐’에 달려 있다. 산업 현장이 요구하는 것은 사람처럼 움직이는 로봇이 아니라, 사람처럼 오래 일할 수 있는 로봇이며, 그 해답은 전고체 배터리에 있다는 분석이 힘을 얻고 있다.